|
P.251の問題番号「7.1.6」
に対する解答
(a) コンデンサーに蓄えられる電気量を$Q$とすると、
\[ Q=CV_{23}=-CV \]となる。この両辺を時間微分すると、$I=\dot{Q}$であるので、
\[ \dot{V} = -I/C \ \ \ \ \ \ \ \ (1) \]が得られる。一方、コイルにかかる電圧は$L \dot{I}$となるので、キルヒホッフの電圧則より、
\[ L \dot{I} + V_{23} + f(I) = 0 \]となる。したがって、$V = -V_{23}$であるので、
\[ V=L \dot{I} + f(I) \ \ \ \ \ \ \ \ (2) \]が得られる。
(b) $(1)$式の両辺に$L^{\frac{1}{2}}C$をかけると、
\[ \frac{d (C^{\frac{1}{2}} V)}{d ((LC)^{-\frac{1}{2}}t)} = - L^{\frac{1}{2}} I \]となる。また、$(2)$式の両辺に$C^{\frac{1}{2}}$をかけると、
\[ C^{\frac{1}{2}} V = \frac{d (L^{\frac{1}{2}} I)}{d ((LC)^{-\frac{1}{2}}t)} + C^{\frac{1}{2}} f(L^{-\frac{1}{2}} (L^{\frac{1}{2}} I)) \]となる。したがって、$x=L^{\frac{1}{2}} I, \ \ w=C^{\frac{1}{2}}V, \ \ \tau = (LC)^{-\frac{1}{2}}t, \ \ F(x) = f(L^{-\frac{1}{2}} x), \ \ \mu = C^{\frac{1}{2}}$とおくと、
\[ \frac{d w}{d \tau} = -x, \ \ \frac{d x}{d \tau} = w - \mu F(x) \]が得られる。
投稿者:goodbook
投稿日時:2021-01-15 06:24:07
|
|
|
P.252の問題番号「7.1.8」
に対する解答
系$\ddot{x} + a \dot{x} (x^2 + \dot{x}^2 - 1) + x = 0, \ \ a>0$
(a) この系をベクトル場として
$\dot{x} = y, \ \ \dot{y} = -a y (x^2+y^2-1)-x$
と表せる。この系の固定点は$(0,0)$。また、ヤコビ行列は
\[ A = \begin{pmatrix} 0 & 1 \\ -1 & a \end{pmatrix}, \ \ \tau=a, \ \ \Delta=1, \ \ \tau^2-4 \Delta = a^2 - 4 \]となる。したがって
i) $0<a<2$のとき、原点は不安定スパイラルとなる。
ii) $a=2$のとき、原点は縮退した不安定ノードとなる。
iii) $a>2$のとき、原点は不安定ノードとなる。
(b) $x=r \cos \theta, \ \ y =r \sin \theta$とおいて、この系を極座標で表すと、
$\dot{r} = -a r (r^2 -1 )\sin^2 \theta, \ \ \dot{\theta} = -a (r^2-1) \sin \theta \cos \theta -1$
となる。動径方向のダイナミクスを直線上のベクトル場として取り扱うと、$\theta=n \pi$ ($n$は整数)のときを除けば、$r^*=0$は不安定固定点、$r^*=1$は安定固定点となる。このとき、$r^*=1$の円上では、$\dot{r}=0, \ \ \dot{\theta} = -1$が成り立ち、これは$\theta=n \pi$でも成り立つ。
つまり、この系は振幅$1$、周期$2\pi$の円形のリミットサイクルをもつ。
(c) (b)より、$r^*=1$は安定固定点であるので、リミットサイクルは安定である。
(d) 非線形な減衰項$a \dot{x}(x^2+\dot{x}^2-1)$は、$x^2+\dot{x}^2>1$で通常の正の減衰として働くが、$x^2+\dot{x}^2<1$では負の減衰となる。つまり、この項は大きな振幅の振動を減衰させるが、振幅が小さくなりすぎると、これを再び大きくなるように働き、原点を除くすべての軌道は、結局、振幅$1$の円形リミットサイクルにおちついていく。
したがって、他のリミットサイクルはない。
投稿者:goodbook
投稿日時:2021-01-16 12:19:14
|
|
|
P.252の問題番号「7.1.9」
に対する解答
(a) 犬の位置の座標を$(x,y)$とすると、
$ x= \cos \theta - R \cos (\phi + \theta), \ \ y= \sin - R \sin (\phi + \theta) $
と表すことができる。これらの式の両辺を$\theta$で微分すると、
$x' = - \sin \theta - R' \cos (\phi + \theta) + R(\phi'+1) \sin (\phi + \theta) $
$y' = \cos \theta - R' \sin (\phi + \theta) - R(\phi'+1) \cos (\phi + \theta) $
となる。ここで、プライムは$\theta$での微分を表す。
一方、犬の速度ベクトルは常に犬とアヒルを結ぶ直線上にあるので、
$ x' = \cos(\phi + \theta) , \ \ y' = \sin (\phi + \theta) $
と表すこともできる。したがって、これらの式から
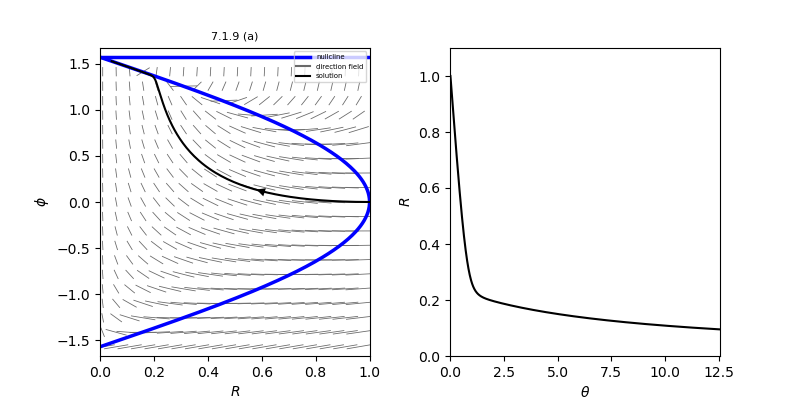
$R' = \sin \phi - 1, \ \ \phi' = \cos \theta / R - 1$
が得られる。これらの方程式は陽に解くことができない。この場合の$(R,\phi)$平面での相図は添付左、$R$の時間変化は右図のようになる。
つまり、犬は$(R,\phi)=(0,\pi/2)$に無限の時間をかけて近づいていくため、アヒルを捕まえることはできない。
(b) 犬がアヒルの$k$倍の速さで泳ぐとすると、
$ x' = k \cos(\phi + \theta) , \ \ y' = k \sin (\phi + \theta) $
となるので、これらの式で再度まとめると、
$R' = \sin \phi - k, \ \ \phi' = \cos \theta / R - 1$
となる。
(c) $k=1/2$のとき、方程式は固定点$(\sqrt{3}/2, \pi/6)$をもつ。このとき、ヤコビ行列は
\[ A = \begin{pmatrix} 0 & \sqrt{3}/2 \\ -2/\sqrt{3} & -1/\sqrt{3} \end{pmatrix}, \ \ \tau=-\frac{1}{\sqrt{3}}, \ \ \Delta=1, \ \ \tau^2-4 \Delta = -\frac{11}{3} \]となるので、安定スパイラルとなる。したがって時間経過すると、$(R,\phi)$上の軌道は$(\sqrt{3}/2, \pi/6)$に近づいていくので、犬の経路は
\[ x= \frac{1}{2} \cos (\theta - \frac{\pi}{3}), \ \ y= \frac{1}{2} \sin (\theta - \frac{\pi}{3}) \]となる。つまり、犬は半径$1/2$の円上を反時計回りに回り続ける。
投稿者:goodbook
投稿日時:2021-01-17 17:35:23
|
|
|
P.253の問題番号「7.2.2」
に対する解答
ポテンシャル$V=x^2-y^2$
この系は$\dot{x} = -2x, \ \ \dot{y} = 2y$と表せる。
固定点は$(0,0)$。このときのヤコビ行列は
\[ A = \begin{pmatrix} -2 & 0 \\ 0 & 2 \end{pmatrix}, \ \ \tau=0, \ \ \Delta=-4 \]となるので、サドル点となる。
\[ \lambda = -2 \ \ \to \ \ \begin{pmatrix} 1 \\ 0 \end{pmatrix}, \ \
\lambda = 2 \ \ \to \ \ \begin{pmatrix} 0 \\ 1 \end{pmatrix} \]したがって、相図は添付図のようになる。

投稿者:goodbook
投稿日時:2021-01-19 04:49:53
|
|
|
P.253の問題番号「7.2.5」
に対する解答
(a) 系$\dot{x} = f(x,y), \ \ \dot{y} = g(x,y)$が勾配系であるならば、$\partial f / \partial y = \partial g / \partial x$。
証明)系が勾配系であるので、
\[ f(x,y) = -\frac{\partial V(x,y)}{\partial x}, \ \ g(x,y) = -\frac{\partial V(x,y)}{\partial y} \]となるポテンシャル$V(x,y)$が存在する。このとき、
\[ \frac{ \partial f(x,y)}{\partial y} = -\frac{\partial^2 V(x,y)}{\partial y \partial x}, \ \ \frac{ \partial g(x,y)}{\partial x} = -\frac{\partial^2 V(x,y)}{\partial x \partial y} \]となり、$V(x,y)$が連続微分可能な関数であることを考慮すると、
\[ \frac{\partial f(x,y)}{\partial y} = \frac{\partial g(x,y)}{ \partial x} \]が成り立つ。
(b) $\partial f / \partial y = \partial g / \partial x$ならば、系$\dot{x} = f(x,y), \ \ \dot{y} = g(x,y)$は勾配系か?
まず、
\[ \frac{\partial f(x,y)}{\partial y} = \frac{\partial g(x,y)}{ \partial x} = v(x,y) \]とおくと、
\[ f(x,y)= \int^y v(x,y') d y', \ \ g(x,y)= \int^x v(x',y) d x' \]と表すことができる。次に、$f, \ g$をそれぞれ、
\[ f(x,y) = -\frac{\partial V_f(x,y)}{\partial x}, \ \ g(x,y) = -\frac{\partial V_g(x,y)}{\partial y} \]と表すことができるとすると、
\[ V_f(x,y)= -\int^x \left( \int^y v(x',y') d y' \right) d x', \ \ V_g(x,y)= -\int^y \left( \int^x v(x',y') d x' \right) d y' \]となる。$f,g$が滑らかな関数であることを考慮すると、
\[ V_f(x,y) = V_g(x,y) \]となり、これらの関数をポテンシャル関数とみなすことができる。したがって、系$\dot{x} = f(x,y), \ \ \dot{y} = g(x,y)$は勾配系となる。
投稿者:goodbook
投稿日時:2021-01-23 05:34:41
|
|
|
P.253の問題番号「7.2.6」
に対する解答
(a) $\dot{x}=y^2+y \cos x, \ \ \dot{y} = 2xy + \sin x $
まず、
\[ -\frac{\partial V(x,y)}{\partial x} = y^2 + y \cos x \]より
\[ V(x,y) = -x y^2 - y \sin x + C(y) \]となる。ここで$C(y)$は$y$の関数である。これを、
\[ -\frac{\partial V(x,y)}{\partial y} = 2xy + \sin x \]に代入すると、
\[ \frac{d C(y)}{d y} = 0 \]が得られる。つまり、$C(y)$は定数項である。したがって、$C(y)=0$と選ぶと、
\[ V(x,y) = -x y^2 - y \sin x \]となる。
(b) $\dot{x} = 3x^2-1-e^{2y}, \ \ \dot{y} = -2 x e^{2y} $
まず、
\[ -\frac{\partial V(x,y)}{\partial x} = 3x^2-1-e^{2y} \]より
\[ V(x,y) = -x^3 + x + x e^{2y} + C(y) \]となる。ここで$C(y)$は$y$の関数である。これを、
\[ -\frac{\partial V(x,y)}{\partial y} = -2 x e^{2y} \]に代入すると、
\[ \frac{d C(y)}{d y} = 0 \]が得られる。つまり、$C(y)$は定数項である。したがって、$C(y)=0$と選ぶと、
\[ V(x,y) =-x^3 + x + x e^{2y} \]となる。
投稿者:goodbook
投稿日時:2021-01-23 06:02:09
|
|