|
P.262の問題番号「7.6.20」
に対する解答
ダフィン方程式$\ddot{x}+x+\varepsilon x^3 = 0, \ \ 0< \varepsilon \ll 1, \ \ x(0)=a, \ \ \dot{x}(0)=0$
(a) $x(t, \varepsilon) = x_0(t) + \varepsilon x_1(t) + \mathcal{O}(\varepsilon^2)$とおき、ダフィン方程式に代入すると、
\[ \ddot{x}_0 + \varepsilon \ddot{x}_1 + x_0 + \varepsilon x_1 + \varepsilon (x_0 + \varepsilon x_1)^3 + \mathcal{O}(\varepsilon^2) = 0 \]となるので、$\varepsilon$のべきごとに整理すると、
\[ \begin{align}
\mathcal{O}(1) \ &: \ \ddot{x}_0 + x_0 = 0 \\
\mathcal{O}(\varepsilon) \ &: \ \ddot{x}_1 + x_1 = - x_0^3
\end{align}
\]が得られる。また、初期条件は
\[ \begin{align}
x(0) &= x_0(0) + \varepsilon x_1(0) + \mathcal{O}(\varepsilon^2) = a \\
\dot{x}(0) &= \dot{x}_0(0) + \varepsilon \dot{x}_1(0) + \mathcal{O}(\varepsilon^2) = 0
\end{align}
\]となるので、$\varepsilon$のべきごとに整理すれば、$x_0(0)=a, \ \dot{x}_0(0)=0$、および$x_1(0)=\dot{x}_1(0)=0$が得られる。
したがって、$\mathcal{O}(1)$の方程式から
\[ x_0(t) = a \cos t \]が得られ、$\mathcal{O}(\varepsilon)$の方程式から、
\[ x_1(\tau) = -\frac{3}{8} a^3 t \sin t + \frac{1}{32} a^3 ( \cos 3 t - \cos t ) \]が得られる。つまり、通常の摂動法を用いると、
\[ x(t, \varepsilon) = a \cos t + \varepsilon a^3 \left[ -\frac{3}{8} t \sin t + \frac{1}{32} ( \cos 3 t - \cos t ) \right] + \mathcal{O}(\varepsilon^2) \]が得られる。
演習問題7.6.19の結果より、$\varepsilon \ll 1$のとき、
\[ \begin{align}
x_0(\tau) &= a \cos \tau = a \cos \omega t = a \cos \left( 1 + \frac{3}{8} \varepsilon a^2 + \mathcal{O}(\varepsilon^2) \right) t \\
&= a \cos t - \frac{3}{8} \varepsilon a^3 t \sin t + \mathcal{O}(\varepsilon^2)
\end{align} \]となる。通常の摂動法による永年項はこの近似により生じており、これを$\varepsilon$のオーダーまでで見ると、振幅が$t$とともに増加するように見えるが、これは間違い。
投稿者:goodbook
投稿日時:2021-03-13 08:10:59
|
|
|
P.262の問題番号「7.6.21」
に対する解答
解)$\tau = \omega t$とおくと、方程式は
\[ \omega^2 x'' + \varepsilon \omega (x^2-1) x' + x = 0 \]となる。$x(t, \varepsilon) = x_0(t) + \varepsilon x_1(t) + \varepsilon^2 x_2(t) + \mathcal{O}(\varepsilon^3), \ \ \omega = 1 + \varepsilon \omega_1 + \varepsilon^2 \omega_2 + \mathcal{O}(\varepsilon^3)$とおき、方程式に代入すると、
\[ (1 + \varepsilon \omega_1 + \varepsilon^2 \omega_2)^2 ( x_0'' + \varepsilon x_1'' + \varepsilon^2 x_2'') \\
+ \varepsilon (1 + \varepsilon \omega_1) \{ ( x_0 + \varepsilon x_1 )^2 -1 \}(x_0' + \varepsilon x_1' ) + (x_0 + \varepsilon x_1 + \varepsilon^2 x_2 ) + \mathcal{O}(\varepsilon^3) = 0 \]となるので、$\varepsilon$のべきごとに整理すると、
\[ \begin{align}
\mathcal{O}(1) \ &: \ x_0'' + x_0 = 0 \\
\mathcal{O}(\varepsilon) \ &: \ x_1'' + x_1 + 2 \omega_1 x_0'' + (x_0^2 - 1 ) x_0' = 0 \\
\mathcal{O}(\varepsilon^2) \ &: \ x_2'' + x_2 + ( \omega_1^2 + 2 \omega_2) x_0'' + 2 \omega_1 x_1'' + (x_0^2 - 1 ) (\omega_1 x_0' + x_1' ) + 2 x_0 x_0' x_1 = 0
\end{align}
\]が得られる。$\mathcal{O}(1)$の方程式から
\[ x_0(\tau) = r_0 \cos (\tau + \phi_0) \]が得られる。次に、$\mathcal{O}(\varepsilon)$の方程式は、
\[ x_1'' + x_1 = 2 \omega_1 r_0 \cos (\tau + \phi_0) + \left( \frac{r_0^3}{4} - r_0 \right) \sin (\tau + \phi_0) + \frac{r_0^3}{4} \sin 3(\tau+\phi_0) \]となる。この式から永年項を回避するために、
\[ \omega_1 = 0, r_0 = 2 \]が得られる。また、このとき、
\[ x_1(\tau) = r_1 \cos (\tau + \phi_1) - \frac{1}{4} \sin 3(\tau+ \phi_0) \]となる。さらに、$\mathcal{O}(\varepsilon^2)$の方程式は、
\[ \begin{align}
x_2'' + x_2 &= \left( 4 \omega_2 + r_1 \sin( \phi_0 - \phi_1) + \frac{1}{4} \right) \cos(\tau+ \phi_0) \\
&+ r_1 ( 1+ \cos (\phi_0-\phi_1) ) \sin (\tau + \phi_0) \\
&+ 3 \left( - r_1 \sin (\phi_0 - \phi_1) + \frac{1}{4} \right) \cos 3(\tau+\phi_0) \\
&+ 3r_1 \cos(\phi_0 - \phi_1) \sin 3 (\tau + \phi_0) + \frac{5}{4} \cos 5(\tau+\phi_0)
\end{align} \]となるので、永年項を回避するために、
\[ \omega_2 = - \frac{1}{16} \]が得られる。したがって、リミットサイクルの振動数は、
\[ \omega = 1 - \frac{1}{16} \varepsilon^2 + \mathcal{O}(\varepsilon^3) \]となる。
投稿者:goodbook
投稿日時:2021-03-13 12:05:31
|
|
|
P.262の問題番号「7.6.22」
に対する解答
系$\ddot{x} + x + \varepsilon x^2 = 0, \ \ x(0)=a, \ \ \dot{x}(0)=0$
解)$\tau = \omega t$とおくと、方程式は
\[ \omega^2 x'' + x + \varepsilon x^2 = 0 \]となる。$x(t, \varepsilon) = x_0(t) + \varepsilon x_1(t) + \varepsilon^2 x_2(t) + \mathcal{O}(\varepsilon^3), \ \ \omega = 1 + \varepsilon \omega_1 + \varepsilon^2 \omega_2 + \mathcal{O}(\varepsilon^3)$とおき、方程式に代入すると、
\[ (1 + \varepsilon \omega_1 + \varepsilon^2 \omega_2)^2 ( x_0'' + \varepsilon x_1'' + \varepsilon^2 x_2'') \\
+ (x_0 + \varepsilon x_1 + \varepsilon^2 x_2 ) + \varepsilon (1 + \varepsilon \omega_1)^2 + \mathcal{O}(\varepsilon^3) = 0 \]となるので、$\varepsilon$のべきごとに整理すると、
\[ \begin{align}
\mathcal{O}(1) \ &: \ x_0'' + x_0 = 0 \\
\mathcal{O}(\varepsilon) \ &: \ x_1'' + x_1 + 2 \omega_1 x_0'' + x_0^2 = 0 \\
\mathcal{O}(\varepsilon^2) \ &: \ x_2'' + x_2 + ( \omega_1^2 + 2 \omega_2) x_0'' + 2 \omega_1 x_1'' + 2 x_0 x_1 = 0
\end{align}
\]となる。また、初期条件は
\[ x_0(0) = a, \ \ x_0'(0)=0, \ \ x_1(0) = 0, \ \ x_1'(0)=0, \ \ x_2(0) = 0, \ \ x_2'(0)=0 \]となる。
投稿者:goodbook
投稿日時:2021-03-14 05:05:32
|
|
|
P.262の問題番号「7.6.23」
に対する解答
系$\ddot{x} - \varepsilon x \dot{x} + x = 0$
解)$\tau = \omega t$とおくと、方程式は
\[ \omega^2 x'' - \varepsilon x x' + x = 0 \]となる。$x(t, \varepsilon) = x_0(t) + \varepsilon x_1(t) + \varepsilon^2 x_2(t) + \mathcal{O}(\varepsilon^3), \ \ \omega = 1 + \varepsilon \omega_1 + \varepsilon^2 \omega_2 + \mathcal{O}(\varepsilon^3)$とおき、方程式に代入すると、
\[ (1 + \varepsilon \omega_1 + \varepsilon^2 \omega_2)^2 ( x_0'' + \varepsilon x_1'' + \varepsilon^2 x_2'') \\
- \varepsilon (1 + \varepsilon \omega_1) ( x_0 + \varepsilon x_1 ) (x_0' + \varepsilon x_1' ) + (x_0 + \varepsilon x_1 + \varepsilon^2 x_2 ) + \mathcal{O}(\varepsilon^3) = 0 \]となるので、$\varepsilon$のべきごとに整理すると、
\[ \begin{align}
\mathcal{O}(1) \ &: \ x_0'' + x_0 = 0 \\
\mathcal{O}(\varepsilon) \ &: \ x_1'' + x_1 + 2 \omega_1 x_0'' - x_0 x_0' = 0 \\
\mathcal{O}(\varepsilon^2) \ &: \ x_2'' + x_2 + ( \omega_1^2 + 2 \omega_2) x_0'' + 2 \omega_1 x_1'' - \omega_1 x_0 x_0' - x_0' x_1 - x_0 x_1' = 0
\end{align}
\]が得られる。$\mathcal{O}(1)$の方程式から
\[ x_0(\tau) = r_0 \cos (\tau + \phi_0) \]が得られる。次に、$\mathcal{O}(\varepsilon)$の方程式は、
\[ x_1'' + x_1 = 2 \omega_1 r_0 \cos (\tau + \phi_0) - \frac{r_0^2}{2} \sin 2 (\tau + \phi_0) \]となる。この式から永年項を回避するために、
\[ \omega_1 = 0 \]が得られる。また、このとき、
\[ x_1(\tau) = r_1 \cos (\tau + \phi_1) + \frac{r_0^2}{6} \sin 2(\tau+ \phi_0) \]となる。さらに、$\mathcal{O}(\varepsilon^2)$の方程式は、
\[ x_2'' + x_2 = \left( 2 \omega_2 r_0 + \frac{r_0^3}{12} \right) \cos(\tau+ \phi_0) + \frac{r_0^3}{4} \cos 3(\tau + \phi_0) -r_0 r_1 \sin (2 \tau + \phi_0 + \phi_1 ) \]となるので、永年項を回避するために、
\[ \omega_2 = - \frac{r_0^2}{24} \]が得られる。したがって、振幅と振動数の間の近似的な関係式は、
\[ \omega \approx 1 - \frac{1}{24} \varepsilon^2 r_0^2 \]となる。
投稿者:goodbook
投稿日時:2021-03-14 06:12:48
|
|
|
P.262の問題番号「7.6.24」
に対する解答
系$\ddot{x}+x-\varepsilon x^3 = 0, \ \ x(0)=a, \ \ \dot{x}(0) = 0$
解)数式処理パッケージとして、sympyを用いる。
$\tau = \omega t$とおくと、方程式は
\[ \omega^2 x'' + x - \varepsilon x^3 = 0 \]となる。$x(t, \varepsilon) = x_0(t) + \varepsilon x_1(t) + \varepsilon^2 x_2(t) + \varepsilon^3 x_3(t) + \mathcal{O}(\varepsilon^4), \ \ \omega = 1 + \varepsilon \omega_1 + \varepsilon^2 \omega_2 + \varepsilon^3 \omega_3 + \mathcal{O}(\varepsilon^4)$とおき、方程式に代入すると、
\[ (1 + \varepsilon \omega_1 + \varepsilon^2 \omega_2 + \varepsilon^3 \omega_3 )^2 ( x_0'' + \varepsilon x_1'' + \varepsilon^2 x_2'' + \varepsilon^3 x_3'') \\
+ (x_0 + \varepsilon x_1 + \varepsilon^2 x_2 + \varepsilon^3 x_3 ) - \varepsilon (x_0 + \varepsilon x_1 + \varepsilon^2 x_2 )^3 + \mathcal{O}(\varepsilon^4) = 0 \]となるので、$\varepsilon$のべきごとに整理すると、
\[ \begin{align}
\mathcal{O}(1) \ &: \ x_0'' + x_0 = 0 \\
\mathcal{O}(\varepsilon) \ &: \ x_1'' + x_1 = - 2 \omega_1 x_0'' + x_0^3 \\
\mathcal{O}(\varepsilon^2) \ &: \ x_2'' + x_2 = - ( \omega_1^2 + 2 \omega_2) x_0'' - 2 \omega_1 x_1'' + 3 x_0^2 x_1 \\
\mathcal{O}(\varepsilon^3) \ &: \ x_3'' + x_3 = - 2 ( \omega_1 \omega_2 + \omega_3 ) x_0'' - ( \omega_1^2 + 2 \omega_2) x_1'' - 2 \omega_1 x_2'' + 3 x_0 x_1^2 + 3 x_0^2 x_2
\end{align}
\]となる。また、初期条件は
$x_0(0) = a, \ \ x_0'(0)=0$、および$x_k(0) = 0, \ \ x_k'(0)=0 \ \ (k \geq 1)$となる。
投稿者:goodbook
投稿日時:2021-03-16 06:05:43
|
|
|
P.262の問題番号「7.6.25」
に対する解答
系$\ddot{x} + x + \varepsilon h(x,\dot{x},t)=0$
(a) 変数変換$x(t) = r(t) \cos (t+\phi(t)), \ \ \dot{x}(t) = - r(t) \sin (t + \phi(t))$とおいたとき、$y(t)=-\dot{x}(t)$とすると、系は
\[ \dot{x}=-y, \ \ \dot{y} = x + \varepsilon h \]と表すことができ、変数変換
\[ x = r \cos (t+\phi), \ \ y=r \sin (t + \phi) \]は極座標への変換とみなすことができる。したがって、
\[ r \dot{r} = x \dot{x} + y \dot{y} = \varepsilon h y = \varepsilon h r \sin (t+\phi) \]から、
\[ \dot{r} = \varepsilon h \sin (t + \phi) \]が得られる。また、
\[ r^2 (1 + \dot{\phi}) = x \dot{y} - y \dot{x} = r^2 + \varepsilon h x = r^2 + \varepsilon h r \cos (t+\phi) \]から
\[ r \dot{\phi} = \varepsilon h \cos (t+ \phi) \]が得られる。
(b) 移動平均$\langle r \rangle$は
\[ \langle r \rangle = \frac{1}{2 \pi} \int_{t-\pi}^{t+\pi} r(\tau) d \tau = \frac{1}{2 \pi} \int_{-\pi}^{\pi} r(t+\tau) d \tau \]と表せる。したがって、
\[ \begin{align}
\frac{ d \langle r \rangle}{d t} &= \frac{d}{d t} \left[ \frac{1}{2 \pi} \int_{-\pi}^{\pi} r(t+\tau) d \tau \right] \\
&= \frac{1}{2 \pi} \int_{-\pi}^{\pi} \frac{d}{dt} r(t+\tau) d \tau \\
&= \frac{1}{2 \pi} \int_{-\pi}^{\pi} \frac{d r(t+\tau)}{d(t+\tau)} \frac{d(t+\tau)}{dt} d \tau \\
&= \frac{1}{2 \pi} \int_{-\pi}^{\pi} \dot{r}(t+\tau) d \tau \\
&= \langle \frac{dr}{dt} \rangle
\end{align} \]となる。
(c) (b)の結果より
\[ \begin{align}
\frac{ d \langle r \rangle}{d t} &= \langle \dot{r} \rangle = \langle \varepsilon h [x(t), \dot{x}(t), t] \sin(t+\phi(t)) \rangle \\
&= \varepsilon \langle h [r \cos(t+\phi), -r \sin(t+\phi), t] \sin(t+\phi(t)) \rangle
\end{align} \]となる。
投稿者:goodbook
投稿日時:2021-03-18 06:02:03
|
|
|
P.263の問題番号「7.6.26」
に対する解答
方程式$\dot{x} = - \varepsilon x \sin^2 t, \ \ 0 < \varepsilon \ll 1, \ \ x(0) = x_0$
(a) $\sin^2 t = \frac{1}{2} (1 - \cos 2t )$を用いると、この方程式の厳密解は
\[ x(t) = x_0 e^{-\frac{\varepsilon}{2} t + \frac{\varepsilon}{4} \sin 2 t} \]となる。
(b) $x(t)$と$\bar{x}(t)$の差の大きさを考える。
\[ | \bar{x}(t) - x(t) | = \left| \frac{1}{2 \pi} \int_{-\pi}^{\pi} x(t+\tau) d \tau - x(t) \right| = \left| \frac{1}{2 \pi} \int_{-\pi}^{\pi} ( x(t+\tau) - x(t) ) d \tau \right| \]となり、$-\pi \leq \tau \leq \pi$において、$|x(t+\tau)-x(t)|$が最大となる$\tau$を$\tau_{\mathrm{max}}$とすると、
\[ | \bar{x}(t) - x(t) | \leq | x(t+\tau_{\mathrm{max}}) - x(t) | \]となる。一方、
\[ x(t+\tau_{\mathrm{max}}) - x(t) = \int_t^{t+\tau_{\mathrm{max}}} \dot{x}(\tau) d \tau = - \varepsilon \int_t^{t+\tau_{\mathrm{max}}} x \sin^2 \tau d \tau \]となるので、
\[ | \bar{x}(t) - x(t) | \leq \varepsilon \left| \int_t^{t+\tau_{\mathrm{max}}} x \sin^2 \tau d \tau \right| \]が得られる。したがって、
\[ x(t) = \bar{x}(t) + \mathcal{O}(\varepsilon) \]となる。
また、平均化の方法から$\bar{x}$の満たす近似的な微分方程式として
\[ \frac{d \bar{x}}{d t} = - \varepsilon \bar{x} \langle \sin^2 t \rangle = - \frac{1}{2} \varepsilon \bar{x} \]が得られる。これを解くと、
\[ \bar{x}(t) = x_0 e^{-\frac{\varepsilon}{2} t } \]が得られる。
(c) (a)で得た厳密解から
\[ \begin{align} x(t) &= x_0 e^{-\frac{\varepsilon}{2} t } \left( 1 + \frac{\varepsilon}{4} \sin 2 t + \mathcal{O}(\varepsilon^2) \right) \\
&= \bar{x}(t) + \varepsilon \frac{\bar{x}(t)}{4} \sin 2 t + \mathcal{O}(\varepsilon^2)
\end{align} \]となるので、平均化により生じる誤差の大きさは$\varepsilon \frac{\bar{x}(t)}{4} \sin 2 t$程度となる。
投稿者:goodbook
投稿日時:2021-03-18 06:33:46
|
|
|
P.311の問題番号「8.1.1」
に対する解答
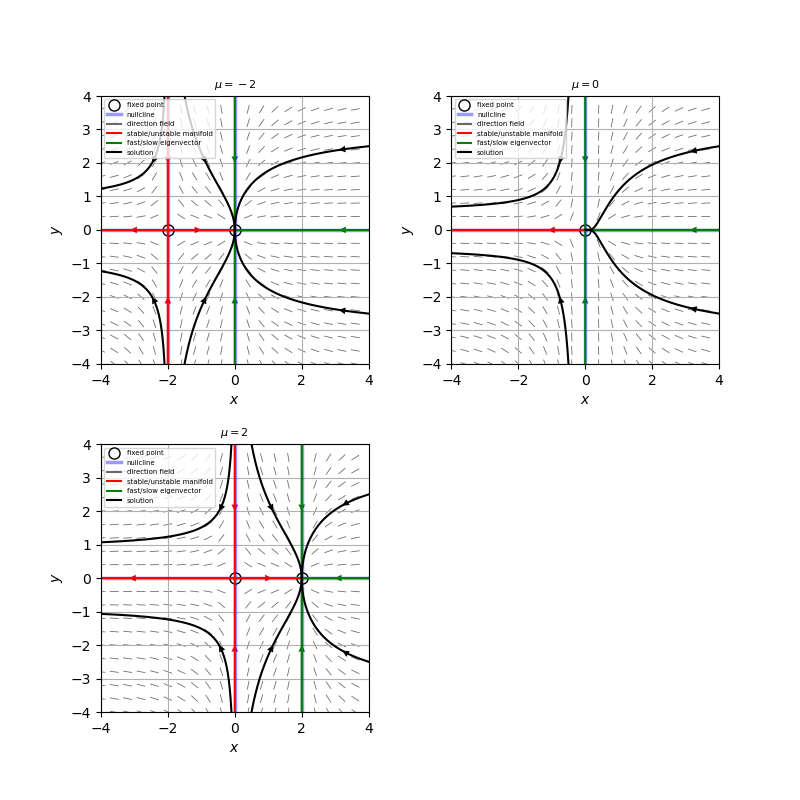
(a) $\dot{x} = \mu x - x^2, \ \ \dot{y} = -y$(トランスクリティカル分岐)
解)この系の固定点は$(0,0), \ \ (\mu, 0)$の2点。各点のヤコビ行列は
\[ (0,0) \ : \ A = \begin{pmatrix} \mu & 0 \\ 0 & -1 \end{pmatrix}, \ \ \tau=\mu-1, \ \ \Delta = -\mu, \ \ \tau^2 - 4 \Delta = (\mu+1)^2 \geq 0 \\
(\mu, 0) \ : \ A = \begin{pmatrix} -\mu & 0 \\ 0 & -1 \end{pmatrix}, \ \ \tau=-\mu-1, \ \ \Delta = \mu, \ \ \tau^2 - 4 \Delta = (\mu-1)^2 \geq 0\]したがって、$\mu < 0$のとき、$(0,0)$は安定ノード、$(\mu,0)$はサドルとなる。$\mu$が増加するにつれて、$(\mu,0)$は原点に近づき、$\mu=0$でこれらは一致する。このとき、原点は孤立していない固定点と予想されるが、実際は$x<0$の領域でサドルのふるまいをし、$x>0$の領域で安定ノードのふるまいをする。さらに、$\mu>0$では$(0,0)$がサドル、$(\mu,0)$が安定ノードとなる。
投稿者:goodbook
投稿日時:2021-03-21 16:12:40
|
|
|
P.312の問題番号「8.1.2」
に対する解答
系$\dot{x} = \mu - x^2, \ \ \dot{y}=-y$
解)$\mu > 0$のとき、この系の固定点は$(\pm \sqrt{\mu}, 0)$の2点で、各点のヤコビ行列は
\[ (\pm \sqrt{\mu}, 0) \ : \ A = \begin{pmatrix} \mp 2 \sqrt{\mu} & 0 \\ 0 & -1 \end{pmatrix}, \ \ \tau= \mp 2 \sqrt{\mu}-1, \ \ \Delta = \pm 2 \sqrt{\mu}, \ \ \tau^2 - 4 \Delta = (2 \sqrt{\mu} \mp 1)^2 \geq 0 \]となる。このとき、各固定点での固有値は
\[ \lambda = \mp 2 \sqrt{\mu}, \ \ -1 \]であるので、それぞれの固定点の固有値のうち1つが$\mu \to 0$で$0$に近づくことがわかる。
投稿者:goodbook
投稿日時:2021-03-22 05:00:37
|
|
|
P.312の問題番号「8.1.3」
に対する解答
系$\dot{x} = \mu x - x^2, \ \ \dot{y}=-y$
解)この系の固定点は$(0,0), \ \ (\mu, 0)$の2点で、各点のヤコビ行列は
\[ (0,0) \ : \ A = \begin{pmatrix} \mu & 0 \\ 0 & -1 \end{pmatrix}, \ \ \tau=\mu-1, \ \ \Delta = -\mu, \ \ \tau^2 - 4 \Delta = (\mu+1)^2 \geq 0 \\
(\mu, 0) \ : \ A = \begin{pmatrix} -\mu & 0 \\ 0 & -1 \end{pmatrix}, \ \ \tau=-\mu-1, \ \ \Delta = \mu, \ \ \tau^2 - 4 \Delta = (\mu-1)^2 \geq 0\]となる。このとき、各固定点での固有値は
\[ (0,0) \ : \ \lambda = \mu, \ \ -1, \ \ \ \ (\mu,0) \ : \ \lambda = -\mu, \ \ -1 \]であるので、それぞれの固定点の固有値のうち1つが$\mu \to 0$で$0$に近づくことがわかる。
投稿者:goodbook
投稿日時:2021-03-22 05:02:37
|
|



